MAPWORMS
Mimicking Adaptation and Plasticity in WORMS
MAPWORMS
Mimicking Adaptation and Plasticity in WORMS
Biomimicry, smart materials and shape-morphing robots
This is the core of the MAPWORMS project and its future, ambitious evolutions: starting a novel paradigm of robotic systems, able to overcome the limitations of current state-of-the-art solutions by embedding responsivity in the constitutive materials of the machines.
Indeed, the main aim of MAPWORMS is developing a new concept of bioinspired robots qualified to fulfill tasks in response to environmental stimuli thanks to their smart materials. In particular, the robot will be able:
- to sense environmental cues;
- to morph its shape;
- to adapt to the environment.
The result is a completely autonomous robot capable of performing many different tasks, rather than a robot controlled by a central unit and able to execute specific tasks only in a pre-defined and structured environment, under detailed circumstances.
What did we take inspiration from? The marine Annelida able to adapt to all the marine habitats, even the extreme ones, by burrowing into sediments, anchoring to holes and crevices, exploring the surroundings by protruding and elongating body parts, and retracting the body to escape predation.
In this way, MAPWORMS is landing the foundation for an unseen artery of robotics.





Biomimicry, smart materials and shape-morphing robots
This is the core of the MAPWORMS project and its future, ambitious evolutions: starting a novel paradigm of robotic systems, able to overcome the limitations of current state-of-the-art solutions by embedding responsivity in the constitutive materials of the machines.
Indeed, the main aim of MAPWORMS is developing a new concept of bioinspired robots qualified to fulfill tasks in response to environmental stimuli thanks to their smart materials. In particular, the robot will be able:
- to sense environmental cues;
- to morph its shape;
- to adapt to the environment.
The result is a completely autonomous robot capable of performing many different tasks, rather than a robot controlled by a central unit and able to execute specific tasks only in a pre-defined and structured environment, under detailed circumstances.
What did we take inspiration from? The marine Annelida able to adapt to all the marine habitats, even the extreme ones, by burrowing into sediments, anchoring to holes and crevices, exploring the surroundings by protruding and elongating body parts, and retracting the body to escape predation.
In this way, MAPWORMS is landing the foundation for an unseen artery of robotics.
MAPWORMS Objectives
Phylogeny, Habitat Adaptation and Plasticity
Mathematical Modeling
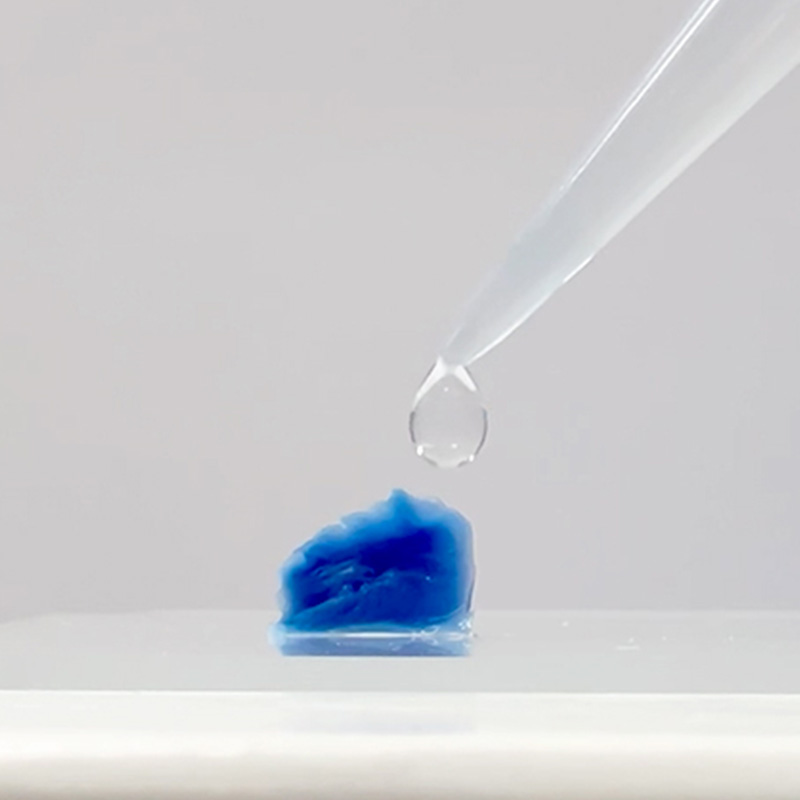
Shape Memory Hydrogels
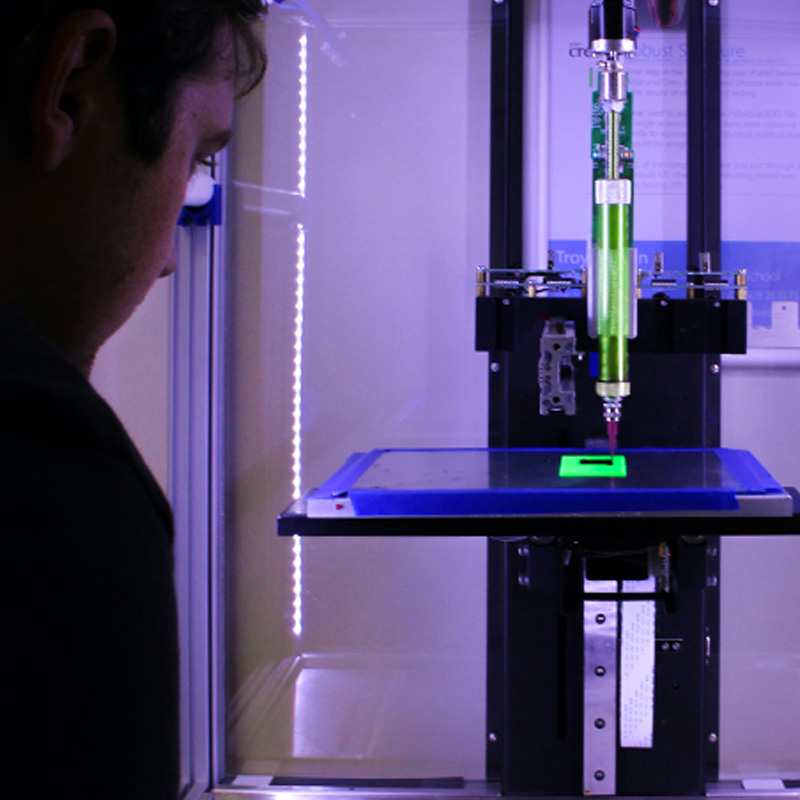
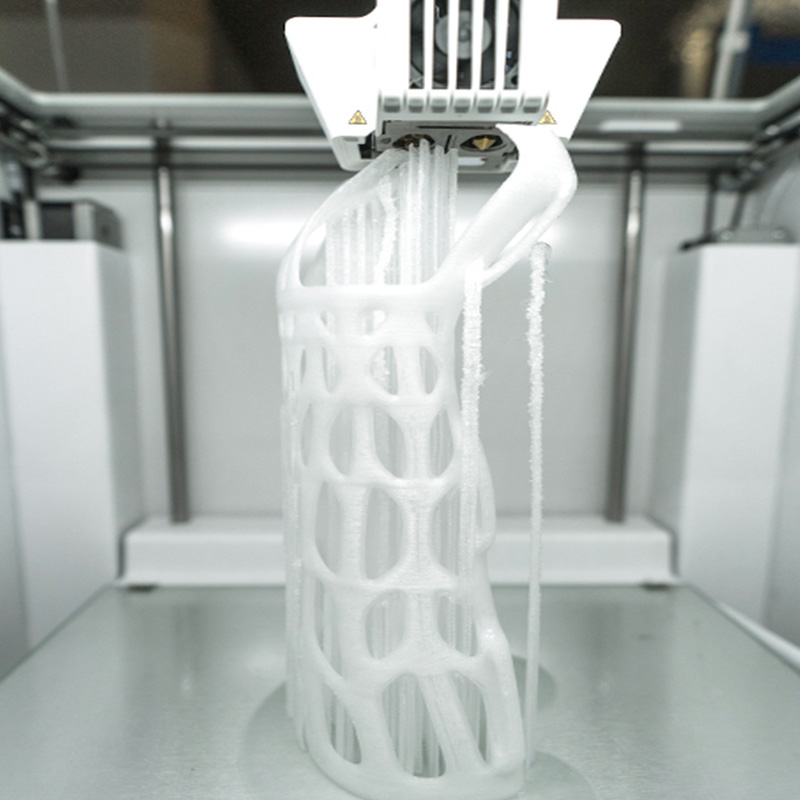
Shape Morphing Robots
MAPWORMS Numbers
Partners
Countries
Months Duration
Milions € Funding
MAPWORMS Latest News

MAPWORMS Plenary Meeting in Lecce
Two days of Plenary Meeting in the marvelous Lecce A plenary meeting occurs when the members of a...
MAPWORMS at RoboSoft 2023, the event focused of Soft Robotics
Soft Robotics for Sustainable Future We are in Singapore and spring is already spreading through...
The II International Ocean Data Conference at UNESCO Headquarters in Paris
The purpose of the Second International Data Conference 2023 “The data we need for the ocean we...
MAPWORMS Consortium
Sant'Anna School of Advanced Studies (SSSA),
The BioRobotics Institute
V.Le R. Piaggio, 34
56025 Pontedera, Italy
info@mapworms.eu
Project Management
Project Coordinator
Arianna Menciassi
Sant'Anna School of Advanced Studies, The BioRobotics Institute
Project Manager
Selene Tognarelli
Sant'Anna School of Advanced Studies, The BioRobotics Institute
Communication Manager
Erika Gulino
Sant'Anna School of Advanced Studies, The BioRobotics Institute
Project Info
Starting date: May 2022
Duration: 48 months
Funding: ~ 2.9 M€
Coordinator: Sant'Anna School of Advanced Studies, The BioRobotics Institute
Partners: 6 from 5 EU countries

This project has received funding from the European Union’s Horizon Europe research and innovation programme under grant agreement N° 101046846
